第二章——编译和配置 Grbl
1. 下载 Grbl 源码
下面是 Grbl 的 Github 仓库地址 Grbl。
下载解压后将 grbl 文件夹复制到 Arduino 的库文件夹中。
Windows 的路径应该是C:\Users\MrAddict\Documents\Arduino\libraries。
然后打开 Arduino IDE,点击文件->示例->grbl->grblUpload准备编译和烧录 Grbl。
2. 编译和烧录 Grbl
选择对应的开发板和端口,然后点击上传按钮,等待编译和烧录完成。
注意:
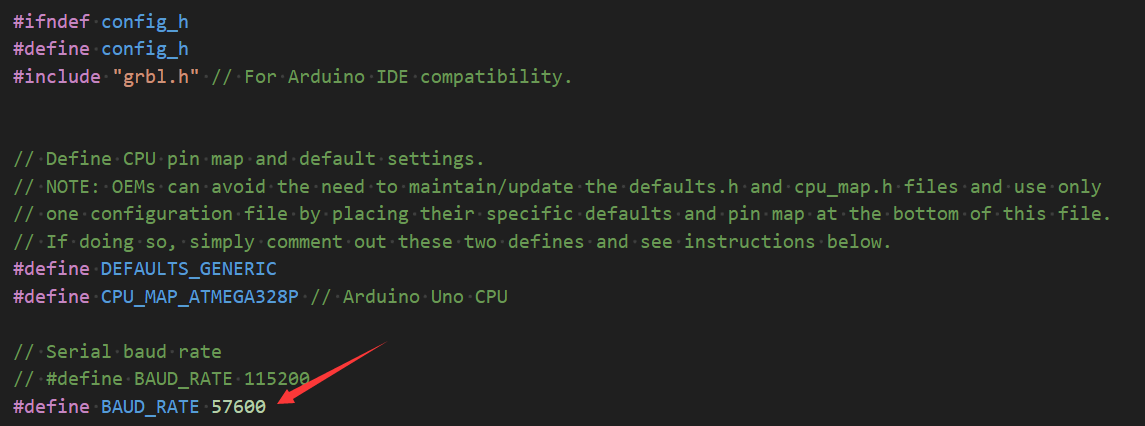
由于 Grbl 默认的波特率是
115200,在使用过程中我发现通信不是很稳定,所以我将波特率改为了57600,这个配置在复制的 grbl 库的config.h中修改波特率,然后重新编译和烧录。
3. 配置 Grbl
在编译和烧录完成后,打开串口监视器,输入$$,回车,就可以看到 Grbl 的配置信息。
下面是我们办公室的激光雕刻机的配置信息:
$0=10
$1=25
$2=0
$3=0
$4=0
$5=0
$6=0
$10=0
$11=0.010
$12=0.002
$13=0
$20=0
$21=0
$22=1
$23=0
$24=400.000
$25=3000.000
$26=250
$27=2.000
$30=100
$31=0
$32=1
$100=80.000
$101=80.000
$102=80.000
$110=3000.000
$111=3000.000
$112=3000.000
$120=1000.000
$121=1000.000
$122=1000.000
$130=300.000
$131=330.000
$132=300.000
Grbl 支持设置存储两条开机自启命令,如果设置了 Home,那么机器就会在 Home 之后自动执行存储的这两条命令。我们可以用$N读取配置信息,$Nx设置配置信息。
比如,我们希望机器 Home 之后自动回到工作原点(-200,-240),并将其设为工作原点,那么我们进行如下设置:
回到工作原点位置:
$N0=G53X-200Y-240
将该位置设置为机器的工作原点:
$N1=G92X0Y0