第五章——总结和拓展
1. 拓展 1
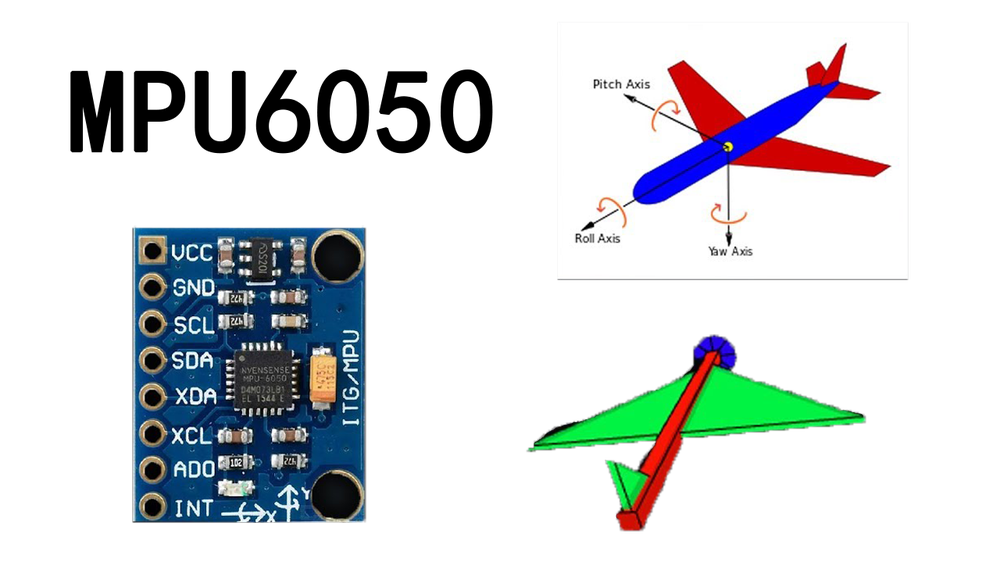
我们在这一章只是读取 MPU9250 的原始数据,没有读取到的进行加工。原因很简单,我对如何使用 MPU9250 的数据还不是很了解,但是,MPU 获取的数据,一般就是用来做姿态解算,通过陀螺仪的数据获取当前的 MPU 姿态,计算出roll,yaw和pitch。
其实在手机内部,游戏手柄,无人机等等都是通过 MPU 获取数据,然后进行姿态解算的。这属于算法范畴,涉及复杂的数学推理运算,在这里我就不做介绍,有能力的同学可以自行查找相关资料进行学习。
如果你想尝试 MPU 的姿态解算,可以使用Jrowberg 的 GitHub 项目,里面包含了各个单片机平台的 MPU 库。
2. 拓展 2
MPU9250 和 MPU6050 在寄存器上几乎一致,只是存在些微差别,比如 ID 的默认值不同,计算温度的公式不同等等。MPU9250 的功能也要比 MPU6050 强大一些。MPU9250 是 9 轴的,支持 SPI;而 MPU6050 是 6 轴的,不支持 SPI。这也是我在这一章使用 MPU9250 的原因。
但是呢,通常情况下,我们都只使用 I2C 的通信模式,而不使用 SPI。
下面是 MPU9250 的 I2C 示例代码,大家可以参考一下:
#include <Wire.h>
#define MPU_ADDR 0x68
#define MPU_FSYNC_ADDR 0x1A
#define MPU_GFS_ADDR 0x1B
#define MPU_AFS_ADDR 0x1C
#define MPU_EN_INT 0x38
#define MPU_ACCEL_ADDR 0x3B
#define MPU_GYRO_ADDR 0x43
#define MPU_TEMP_ADDR 0x41
#define MPU_FIFO_EN 0x6A
#define MPU_RESET 0x6B
#define MPU_ID_ADDR 0x75
void write_data(uint8_t addr, uint8_t data);
uint8_t read_data(uint8_t addr);
void read_data(uint8_t addr, uint8_t* data, uint8_t length);
bool MPU_init();
float readTemp();
void readRawAccel(int16_t* accel);
void readRawGyro(int16_t* gyro);
void setup() {
Serial.begin(115200);
if (MPU_init()) {
Serial.println("MPU init success!");
} else {
Serial.println("MPU init failed!");
}
}
void loop() {
int16_t accel[3], gyro[3];
readRawAccel(accel);
readRawGyro(gyro);
Serial.print("Accel X=");
Serial.print(accel[0]);
Serial.print(",Y=");
Serial.print(accel[1]);
Serial.print(",Z=");
Serial.println(accel[2]);
Serial.print("Gyro X=");
Serial.print(gyro[0]);
Serial.print(",Y=");
Serial.print(gyro[1]);
Serial.print(",Z=");
Serial.println(gyro[2]);
Serial.print("Temp=");
Serial.println(readTemp(), 2);
Serial.println();
delay(1000);
}
void write_data(uint8_t addr, uint8_t data) {
Wire.beginTransmission(MPU_ADDR);
Wire.write(addr);
Wire.write(data);
Wire.endTransmission();
}
uint8_t read_data(uint8_t addr) {
Wire.beginTransmission(MPU_ADDR);
Wire.write(addr);
Wire.endTransmission();
Wire.requestFrom(MPU_ADDR, 1);
return Wire.read();
}
void read_data(uint8_t addr, uint8_t* dest, uint8_t length) {
Wire.beginTransmission(MPU_ADDR);
Wire.write(addr);
Wire.endTransmission();
Wire.requestFrom(MPU_ADDR, length);
for (uint8_t i = 0; i < length; i++) {
dest[i] = Wire.read();
}
}
bool MPU_init() {
// 初始化I2C
Wire.begin();
// 设置I2C频率为100KHz
Wire.setClock(100 * 1000);
// Wake up MPU from sleep mode
write_data(MPU_RESET, 0x00);
// Disable FIFO
write_data(MPU_FIFO_EN, 0x00);
// Disable FSYNC
write_data(MPU_FSYNC_ADDR, 0x00);
// Disable interupt
write_data(MPU_EN_INT, 0x00);
// Set Gyroscope full scable range to ±250°/s
write_data(MPU_GFS_ADDR, 0x00);
// Set Accelerometer full scable range to ±2g
write_data(MPU_AFS_ADDR, 0x00);
// Check ID
if (read_data(MPU_ID_ADDR) == 0x71)
return true;
else
return false;
}
void readRawAccel(int16_t* accel) {
uint8_t buffer[6];
read_data(MPU_ACCEL_ADDR, buffer, 6);
for (uint8_t i = 0; i < 3; i++) {
accel[i] = buffer[i * 2] << 8 | buffer[i * 2 + 1]; // 第一个字节是高位,第二字节是低位
}
}
void readRawGyro(int16_t* gyro) {
uint8_t buffer[6];
read_data(MPU_GYRO_ADDR, buffer, 6);
for (uint8_t i = 0; i < 3; i++) {
gyro[i] = buffer[i * 2] << 8 | buffer[i * 2 + 1]; // 第一个字节是高位,第二字节是低位
}
}
float readTemp() {
int16_t temp;
uint8_t buffer[2];
read_data(MPU_TEMP_ADDR, buffer, 2);
temp = buffer[0] << 8 | buffer[1]; // 第一个字节是高位,第二字节是低位
return (temp / 321.0 + 21); // 温度计算公式:TEMP_degC = TEMP_OUT/321.0 +21
}